1. 基础知识
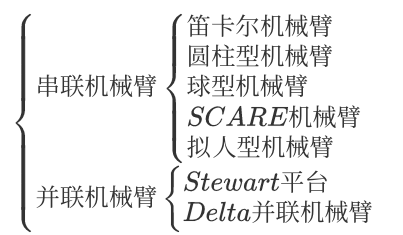
1.1. 机械臂的机械结构
- 导图:
1.2. 减速机
减速机是提高机械臂关节运行精度及扭矩的重要部件,常见的减速器有行星减速机、摆线针轮减速机、谐波减速机及 RV 减速机。
行星减速机
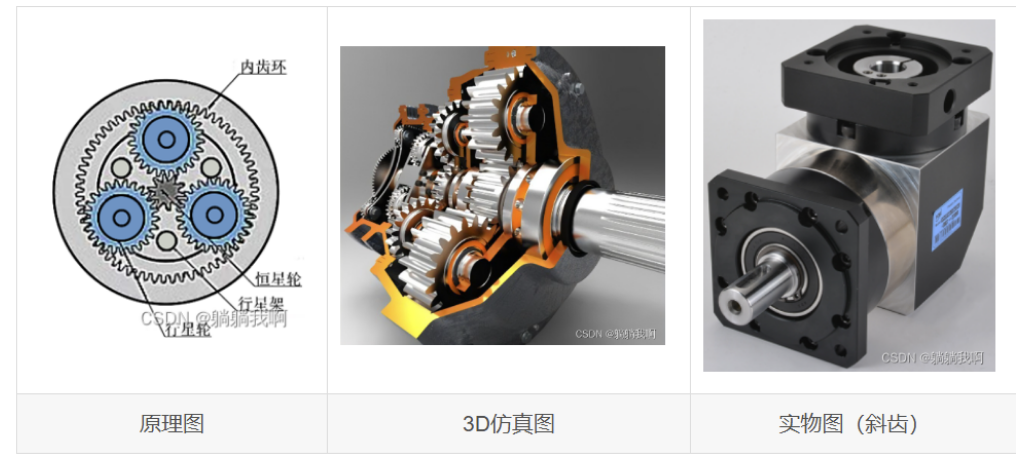
- 体积小、重量轻,承载能力高,使用寿命长、运转平稳,噪声低,功率分流、多齿啮合独用。
- 减速比:, 为行星轮齿数、 为恒星轮齿数
1.3. 末端执行器
1.4. 位姿描述方法
【官方双语/合集】线性代数的本质 - 系列合集_bilibili
机械臂速成小指南(七):机械臂位姿的描述方法-CSDN 博客
1.5. 小指南
1.6. 线代相关知识
向量与矩阵基础:加减、乘法、内积、叉积(用于旋转)
逆矩阵、转置、行列式(逆向运动学需求解方程,行列式用高斯消元法,逆矩阵用高斯-若尔当消元法)
齐次坐标与变换矩阵:将平移和旋转统一为 矩阵,这是 DH 法的核心
旋转矩阵( 群)、欧拉角或四元数简介(姿态表示,避免万向节锁)
可跳过:线性方程组求解(MatLab 可代劳)、特征向量(除非涉及动力学)
MIT 线性代数 - Gilbert Strang :先看 3B1B 的《线性代数的本质》,然后看 Gilbert Strang 教授的课程 1~3 节、5-10 节、14-15 节、17-20 节、30-32 节
齐次变换矩阵:由旋转矩阵 和平移矩阵 合成而成,第四行则补齐为方阵
- 链式法则:如果有底座到关节 1 的变换 和关节 1 到关节 2 的变换 ,则底座到关节 2 的变换为
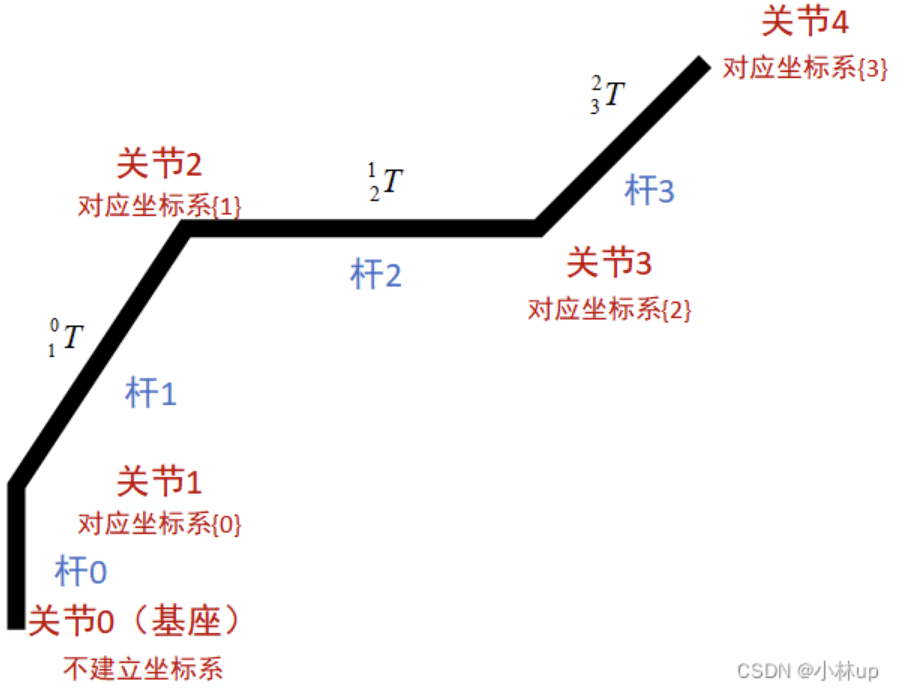
2. DH 参数法
2.1. 传统 DH 参数法
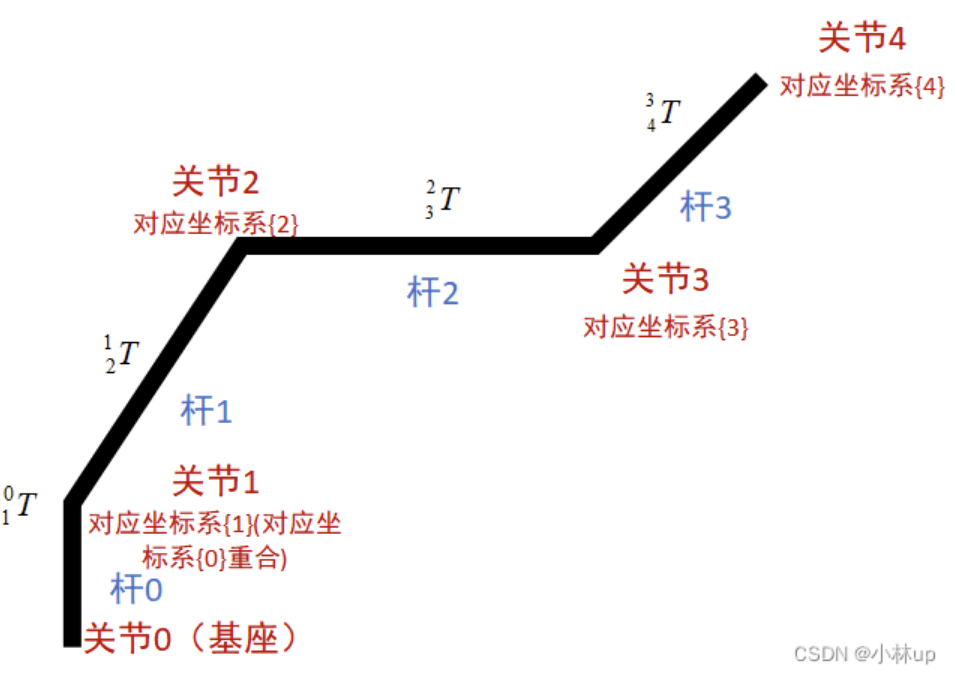
坐标系定义规则:
- 杆 i 的近端是关节 i,远端是关节 i+1(关节 i 轴称为杆 i 驱动轴,关节 i+1 轴称为杆 i 传动轴)
- 确定各坐标系的 z 轴:选取 Z_i 轴沿关节 i+1 的轴向,各平行 Z 轴指向一致
- 确定各坐标系的原点 O:选取原点 O_i 在过 Z_{i-1}轴和 Z_i 轴的公法线上,即此 Z_{i-1}与 Z_i 轴的交点
- 确定各坐标系的 x 轴:选取 X_i 轴沿过 Z_{i-1}轴和 Z_i 轴的公法线,方向由 Z_{i-1}指向 Z_i
- 确定各坐标系的 y 轴:,即构成右手坐标系,细节看下图
- 杆 i 的近端是关节 i,远端是关节 i+1(关节 i 轴称为杆 i 驱动轴,关节 i+1 轴称为杆 i 传动轴)
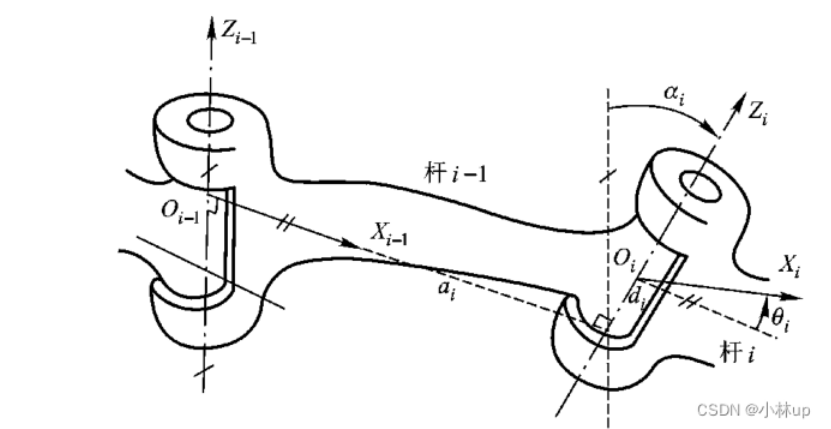
DH 参数定义:
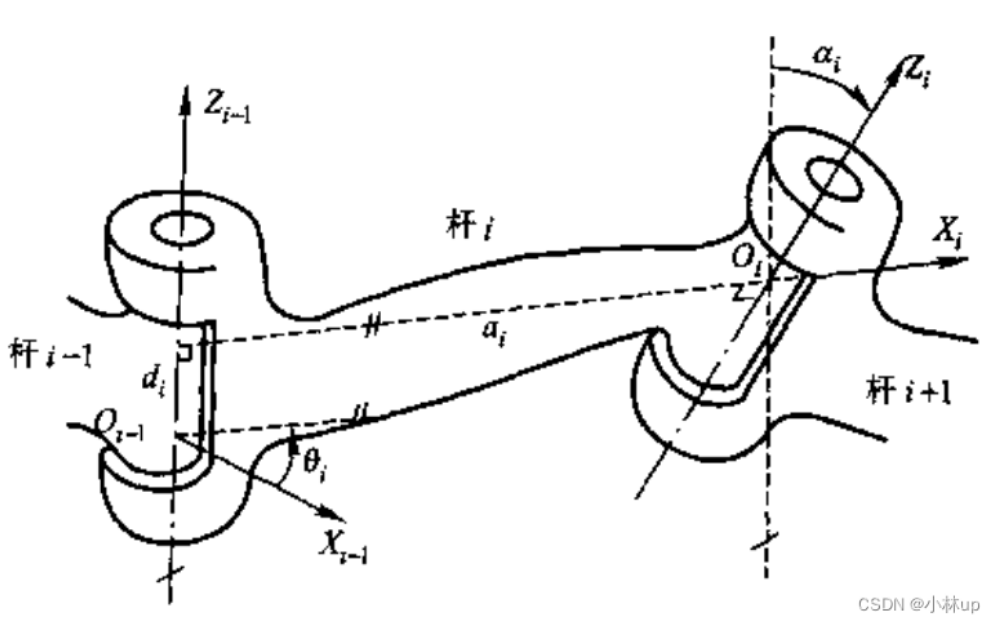
- 杆件长度 :从 轴到 轴的距离,沿 的指向为正
- 杆件扭角 :从 轴到 轴的转角,绕 轴正向转动为正(螺旋定则),
- 关节距离 :从 轴到 轴的距离,沿 轴的指向为正
- 关节转角 :从 轴到 轴的转角,绕 轴正向转动为正,
细节: 机器人学:DH 参数总结(传统 DH 方法和改进 DH 方法)-CSDN 博客机器人学 DH 参数及利用 matlab 符号运算推导-CSDN 博客
2.2. 改进 DH 参数法
传统 DH 参数法问题:对于树形结构或含闭链的机器人,有的杆上会存在多于一个传动轴,这时用传统 D-H 参数法建立杆坐标系时会产生歧义
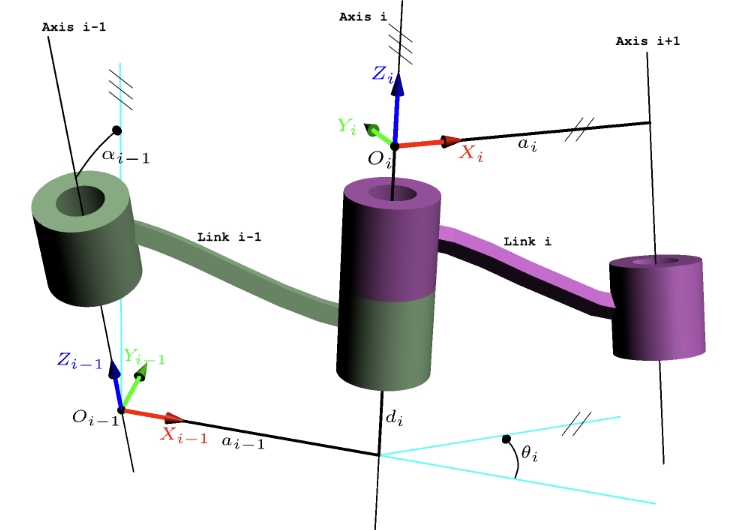
坐标系定义规则:
- 杆 i 的近端是关节 i,远端是关节 i+1(关节 i 轴称为杆 i 驱动轴,关节 i+1 轴称为杆 i 传动轴)
- 确定各坐标系的原点 O:关节轴 i、i+1 的公垂线与关节轴 i 的交点
- 确定各坐标系的 z 轴:沿关节 i 的轴向为 Z_i 轴,各平行 Z 轴指向一致
- 确定各坐标系的 x 轴:过原点及 Z_{i} 轴和 Z_{i+1} 轴的公垂线为 X_i 轴,方向由 Z_{i} 指向 Z_
- 确定各坐标系的 y 轴:,即构成右手坐标系,细节看下图
- 注意事项:如果 与 相交导致无法确定 轴方向,则取 ;如重合,则 X 轴垂直且一致即可
- 杆 i 的近端是关节 i,远端是关节 i+1(关节 i 轴称为杆 i 驱动轴,关节 i+1 轴称为杆 i 传动轴)
DH 参数定义:
- 杆件长度 :从 轴到 轴的距离,沿 的指向为正
- 杆件扭角 :从 轴到 轴的旋转角,绕 轴正向转动为正(螺旋定则),
- 关节距离 :从 轴到 轴的距离,沿 轴的指向为正
- 关节转角 :从 轴到 轴的转角,绕 轴正向转动为正,
细节: 标准 DH 建模与改进 DH 建模_standard dh-CSDN 博客机器人学 DH 参数及利用 matlab 符号运算推导-CSDN 博客
齐次变换矩阵计算顺序:

- **齐次变换矩阵几何意义:**将关节轴 坐标系视角下的向量变换为关节轴 坐标系视角下的向量。可以假定坐标系固定,则向量先沿 轴移动 距离,再绕 轴旋转 角,然后沿 轴移动 距离,最后绕 轴旋转 角;如果参照上图,则可以想象为 中某点不动,坐标系 沿各参数的负值变换成坐标系 ;即
2.3. 正逆运动学解算
正运动学:
- 参数就是零点时的偏移角加关节角,所以驱动层里电机的正反转要对应上;然后其他参数按建模时的参数,按链式法则求得从末端到底座的齐次变换矩阵 ,则旋转向量即姿态,平移向量即坐标。
MatLab 实现:
matlab
function main()
% 测试用的关节角度向量(6个关节)
q_test = [0.1, 0.2, 0.3, 0.4, 0.5, 0.6];
% 计算正向运动学变换矩阵
T_custom = forward_kinematics(q_test);
% 从变换矩阵提取末端执行器的坐标
[x, y, z] = get_end_coor(q_test);
disp("齐次变换矩阵:"); disp(T_custom);
disp("末端坐标:");
fprintf("x: %.4f, y: %.4f, z: %.4f\n", x, y, z);
end
function T = get_tf_matrix(alpha, a, theta, d)
T = [
cos(theta), -sin(theta), 0, a;
sin(theta)*cos(alpha), cos(theta)*cos(alpha), -sin(alpha), -sin(alpha)*d;
sin(theta)*sin(alpha), cos(theta)*sin(alpha), cos(alpha), cos(alpha)*d;
0, 0, 0, 1
];
end
function T_end = forward_kinematics(q)
params = [
0, 0, 0, 0;
pi/2, 0, 0, 0;
0, 0.5, 5*pi/6, 0;
0, 0.577, pi/6, 0;
pi/2, 0.1, pi/2, 0;
pi/2, 0, 0, 0.05
];
T_end = eye(4);
for i = 1:size(params, 1)
alpha = params(i, 1);
a = params(i, 2);
offset = params(i, 3);
d = params(i, 4);
Ti = get_tf_matrix(alpha, a, q(i) + offset, d);
T_end = T_end * Ti;
end
end
function [x, y, z] = get_end_coor(q)
T = forward_kinematics(q);
x = T(1, 4);
y = T(2, 4);
z = T(3, 4);
end
main();逆运动学—— Piper 准则下的解析解:
- 逆运动学很复杂,最简单的情况就是机械臂遵循 Piper 准则(即三个姿态轴交于一点,相当于球形关节),此时分解为前三关节和后三关节。前三关节当做三轴机械臂来求解,后三关节因为关节轴交于一点,所以绕三轴旋转即可。前三关节末端称为腕部中心,后三关节末端为总末端,用 和 将末端坐标转换为腕部中心坐标。
matlab
function main()
% Piper 机械臂模型
L0 = Link('alpha', 0, 'a', 0, 'offset', 0, 'd', 0.15, 'modified');
L1 = Link('alpha', pi/2, 'a', 0, 'offset', 0, 'd', 0, 'modified');
L2 = Link('alpha', 0, 'a', 0.5, 'offset', pi/2, 'd', 0, 'modified');
L3 = Link('alpha', -pi/2, 'a', 0.15, 'offset', 0, 'd', 0.5, 'modified');
L4 = Link('alpha', pi/2, 'a', 0, 'offset', pi, 'd', 0, 'modified');
L5 = Link('alpha', pi/2, 'a', 0, 'offset', 0, 'd', 0, 'modified');
piper_arm = SerialLink([L0 L1 L2 L3 L4 L5], 'name', 'piper');
piper_arm.tool = transl(0, 0, 0.1);
piper_arm.plot(zeros(1,6));
piper_arm.teach;
% 测试逆解
% q_test = [0, 0.2512, -0.7536, 1.3816, 0.3768, 0];
q_test = [-1.2, 1.0, -0.5, 0.93, 1.23, 0.22];
T_test = piper_arm.fkine(q_test).T;
q_inverse = get_inverse_kinematics_as(T_test, 0.1);
T_inverse = piper_arm.fkine(q_inverse).T;
disp("实际的关节角:"); disp(q_test);
disp("解析解计算的关节角:"); disp(q_inverse);
disp("关节角差异:"); disp(q_test - q_inverse);
disp("实际的末端位姿:"); disp(T_test);
disp("解析解计算的末端位姿:"); disp(T_inverse);
disp("末端位姿差异:"); disp(T_test - T_inverse);
disp("实际腕部中心位置:"); disp(T_test(1:3,4) - T_test(1:3,3)*0.1);
disp("解析解计算的腕部中心位置:"); disp(T_inverse(1:3,4) - T_inverse(1:3,3)*0.1);
end
% 计算齐次变换矩阵
function T = get_tf_matrix(alpha, a, theta, d)
T = [
cos(theta), -sin(theta), 0, a;
sin(theta)*cos(alpha), cos(theta)*cos(alpha), -sin(alpha), -sin(alpha)*d;
sin(theta)*sin(alpha), cos(theta)*sin(alpha), cos(alpha), cos(alpha)*d;
0, 0, 0, 1
];
end
% 角度归一化
function angle = normalize_angle(angle)
while angle > pi
angle = angle - 2 * pi;
end
while angle <= -pi
angle = angle + 2 * pi;
end
end
% 解析解
function q = get_inverse_kinematics_as(T_end, tool_d)
% DH 参数
% alpha, a, offset, d
params = [
0, 0, 0, 0.15;
pi/2, 0, 0, 0;
0, 0.5, pi/2, 0;
-pi/2, 0.15, 0, 0.5;
pi/2, 0, pi, 0;
pi/2, 0, 0, 0;
];
% 提取末端位置和 Z 轴方向
P_end = T_end(1:3, 4);
Z_end = T_end(1:3, 3);
% 计算腕部中心 P_c 和三角形边长
P_c = P_end - Z_end * tool_d;
x = P_c(1);
y = P_c(2);
z = P_c(3);
d0 = params(1, 4);
A = params(3, 2);
B = sqrt(params(4, 2)^2 + params(4, 4)^2);
C = sqrt(x^2 + y^2 + (z-d0)^2);
% 检查目标位置是否可达
if(abs((C^2 - A^2 - B^2) / (2 * A * B)) > 1)
error('目标位置不可达');
end
% 计算肘部向上解的关节角 theta0, theta1, theta2
theta0 = atan2(y, x);
theta1 = atan2((z-d0), sqrt(x^2 + y^2)) - acos((A^2 + C^2 - B^2) / (2 * A * C));
theta2 = acos((C^2 - A^2 - B^2) / (2 * A * B)) - atan2(params(4, 4), params(4, 2));
% 计算末端姿态相关的关节角 theta3, theta4, theta5
T_02 = eye(4);
for i = 1:3
alpha = params(i, 1);
a = params(i, 2);
theta = [theta0, theta1, theta2];
d = params(i, 4);
Ti = get_tf_matrix(alpha, a, theta(i), d);
T_02 = T_02 * Ti;
end
R_02 = T_02(1:3, 1:3);
R_end = T_end(1:3, 1:3);
R_25 = R_02' * R_end;
r_11 = R_25(1, 1); r_12 = R_25(1, 2); r_13 = R_25(1, 3);
r_21 = R_25(2, 1); r_22 = R_25(2, 2); r_23 = R_25(2, 3);
r_31 = R_25(3, 1); r_32 = R_25(3, 2); r_33 = R_25(3, 3);
theta4 = atan2(sqrt(r_21^2 + r_22^2), r_23);
theta3 = atan2(r_33, -r_13);
theta5 = atan2(r_22, -r_21);
% 前三轴关节角减去偏移量,归一化所有关节角
q = [theta0, theta1, theta2, theta3, theta4, theta5];
for i = 1:length(q)
if i <= 3
q(i) = q(i) - params(i, 3);
end
q(i) = normalize_angle(q(i));
end
end
main();- 解析解多解及奇异点:
- 解析解总共有八组:肩关节两组 x 肘关节两组 x 腕关节两组;
- 肩关节:向左旋 + 向右旋;
- 肘关节:向上 + 向下;
- 腕关节:向内 + 向外;
- 同时存在奇异点:完全伸展奇异 + 腕部奇异 + 肩部奇异;
- 解析解总共有八组:肩关节两组 x 肘关节两组 x 腕关节两组;
这是关于赞助的一些描述
- 本文链接:https://kaede-rei.github.io/learning-path/arm-motion-control/phase-1/1-1
- 版权声明:本博客所有文章除特别声明外,均默认采用 CC BY-NC-SA 许可协议。

